Arduino a Krokový Motor
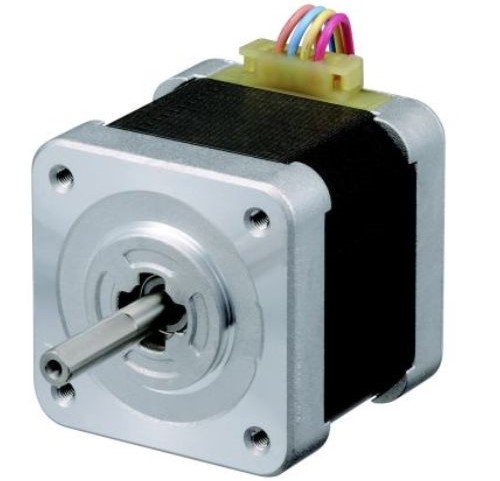
Krokový motor, je bezkomutátorový jednosmerný elektromotor, ktorý sa otáča v sérii malých a diskrétnych uhlových krokov. Krokové motory je možné nastaviť do ľubovoľnej polohy kroku. Poloha kroku sa môže rýchlo zvýšiť alebo znížiť, aby sa vytvorila kontinuálna rotácia, alebo možno motoru nariadiť, aby aktívne udržal svoju polohu v jednom danom kroku. Motory sa líšia veľkosťou, rýchlosťou, rozlíšením krokov a krútiacim momentom.
V krokovom motore existujú dve základné usporiadania vinutia pre elektromagnetické cievky:
- Bipolárne
- Unipolárne.
Unipolárne motory :

Tieto motory majú zvyčajne 5 alebo 6 výstupných vodičov v závislosti od ich vnútorného zapojenia.
Bipolárne motory :
Vo všeobecnosti majú 4 výstupné vodiče. Bipolárne motory majú pár pripojení s jedným vinutím na fázu. Prúd vo vinutí musí byť obrátený, aby sa obrátil magnetický pól, takže budiaci obvod musí byť komplikovanejší, zvyčajne s usporiadaním H-mostíka (existuje však niekoľko bežne dostupných riadiacich čipov, aby sa to stalo jednoduchá záležitosť).Typický spôsob pohonu pre bipolárny krokový motor s dvoma cievkami by bol: A+ B+ A− B−. Teda napájajte cievku A kladným prúdom, potom odstráňte prúd z cievky A; potom napájajte cievku B kladným prúdom, potom odstráňte prúd z cievky B; potom napájajte cievku A záporným prúdom (prehodenie polarity prepnutím vodičov, napr. pomocou H mostíka), potom odstráňte prúd z cievky A; potom napájajte cievku B záporným prúdom (opäť preklápajúca polarita rovnaká ako u cievky A); cyklus je dokončený a začína odznova.
| krok | Cievka A | Cievka B | Cievka C | Cievka D |
|---|---|---|---|---|
| 1 | +V | -V | +V | -V |
| 2 | +V | -V | -V | +V |
| 3 | -V | +V | -V | +V |
| 4 | -V | +V | +V | -V |
V tomto návode budeme potrebovať :
- Bipolárny krokový motor.
- Arduino Nano
- Ovládač motora : L298N
- Prepojovacie vodiče
- Nepájivé kontaktné pole
- Napájací zdroj




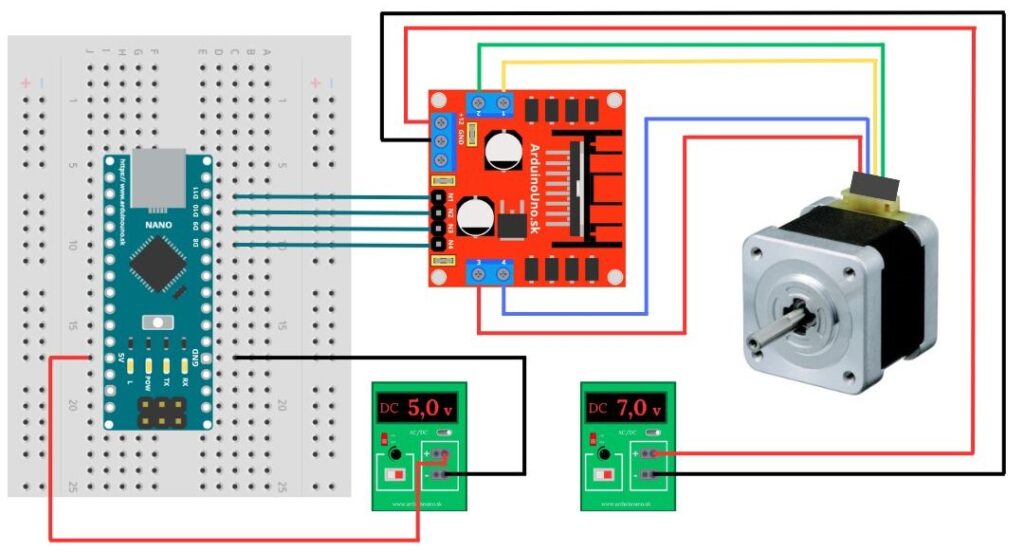
Zapojenie bude vyzerať takto :
- Arduino Nano GND Pin v kontakte s -5V
- Arduino Nano 5V Pin v kontakte s +5V
- Arduino Nano Pin D11 v kontakte ovládača motora N1
- Arduino Nano Pin D10 v kontakte ovládača motora N2
- Arduino Nano Pin D9 v kontakte ovládača motora N3
- Arduino Nano Pin D8 v kontakte ovládača motora N4
- Krokový motor žltý kontakt kolík 1
- Krokový motor zelený kontakt kolík 2
- Krokový motor červený kontakt kolík 3
- Krokový motor modrý kontakt kolík 4
Napájanie Arduina je možné zabezpečiť napríklad a cez USB, Powerbankov.
Stále je dobre skontrolovať Piny zapojenie na akomkoľvek krokovom motore :
(L298N) OUT1 → A+
(L298N) OUT2 → A-
(L298N) OUT3 → B+
(L298N) OUT4 → B-
Program :
/*
Tento program poháňa unipolárny alebo bipolárny krokový motor.
Motor je pripojený k digitálnym kolíkom 8 - 11 Arduina.
Potom by sa mal motor otočiť o jednu otáčku jedným smerom
jednu druhým smerom.
*/
#include <Stepper.h>
const int stepsPerRevolution = 1500; // zmeňte to tak, aby vyhovovalo počtu krokov na otáčku
// inicializuje sa knižnica na kolíkoch 8 až 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// rýchlosť 60 ot./min.
myStepper.setSpeed(60);
// inicializuje sériový port:
Serial.begin(9600);
}
void loop() {
//urobiť jednu otáčku jedným smerom:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// urobiť jednu otáčku opačným smerom:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
článok :
Pridaj komentár