Dual H-bridge driver L298N
Ak ste trochu oboznámení s jednosmernými motormi (motory široko používané v hračkách a robotoch), všimnete si, že ak prepnete polaritu, zmení sa aj smer otáčania, takže ak chcete ísť dopredu a dozadu, musíte prepnúť káble … ale to nie je praktické, potrebujete niečo na to, aby ste to urobili elektronicky bez úpravy akýchkoľvek káblov: Tu sa napr. hodí H-mostík L298N. Dokáže ovládať súčasne 2 jednosmerné motory alebo 1 krokový motor.


Popis:
 indikátor zapnutia.
indikátor zapnutia.- , , , , Vstupné kolíky. Používajú sa na ovládanie smeru otáčania motora/motorov.
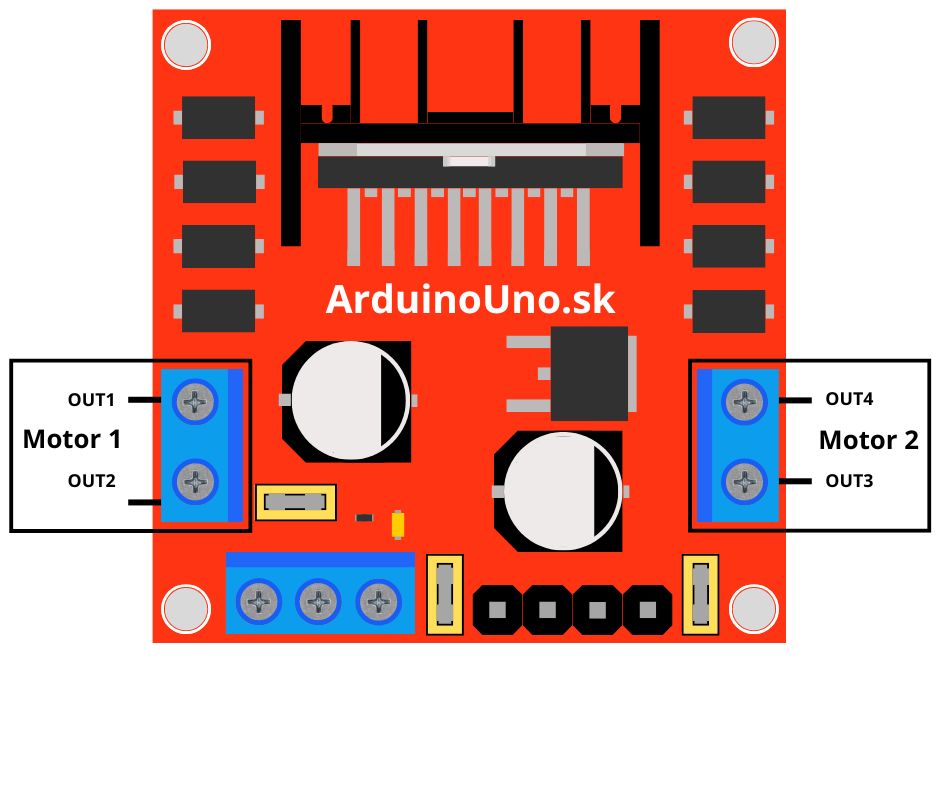
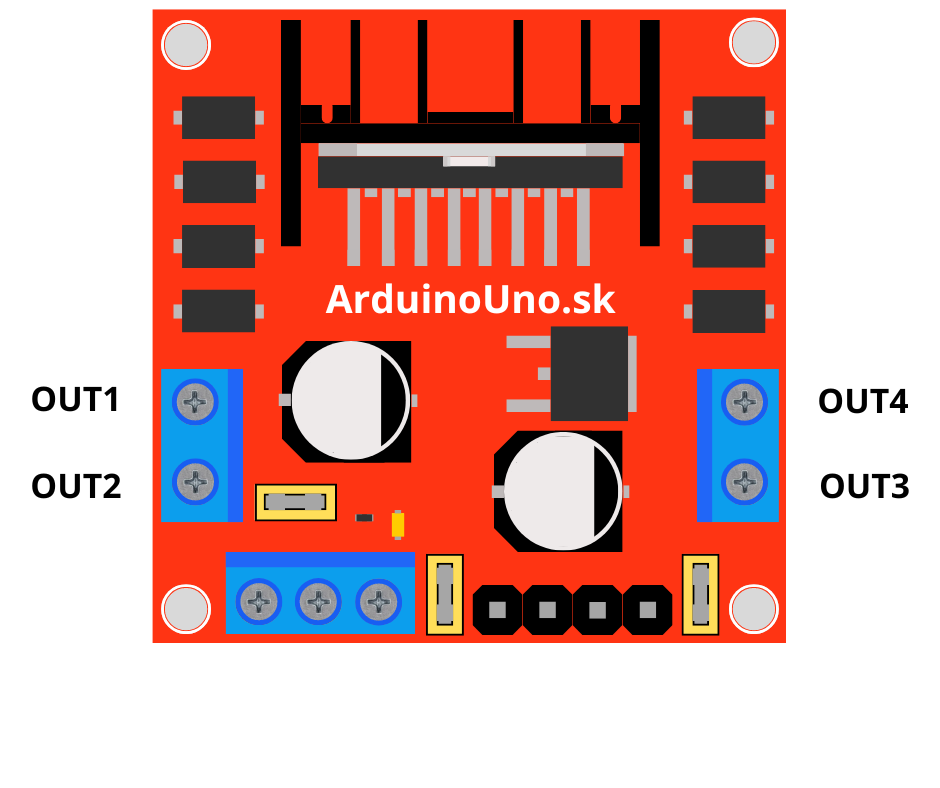
- ( , , ) Vstupné kolíky a . Používajú sa na ovládanie motora 1 (A). na výstupe → (
 a )
a ) - ( , , ) Vstupné kolíky a . Používajú sa na ovládanie motora 2 (B). na výstupe → ( a )
- ( , , , , ) Všetky 4 kolíky. Používajú sa na ovládanie jedného krokového motora.

 jumper signál
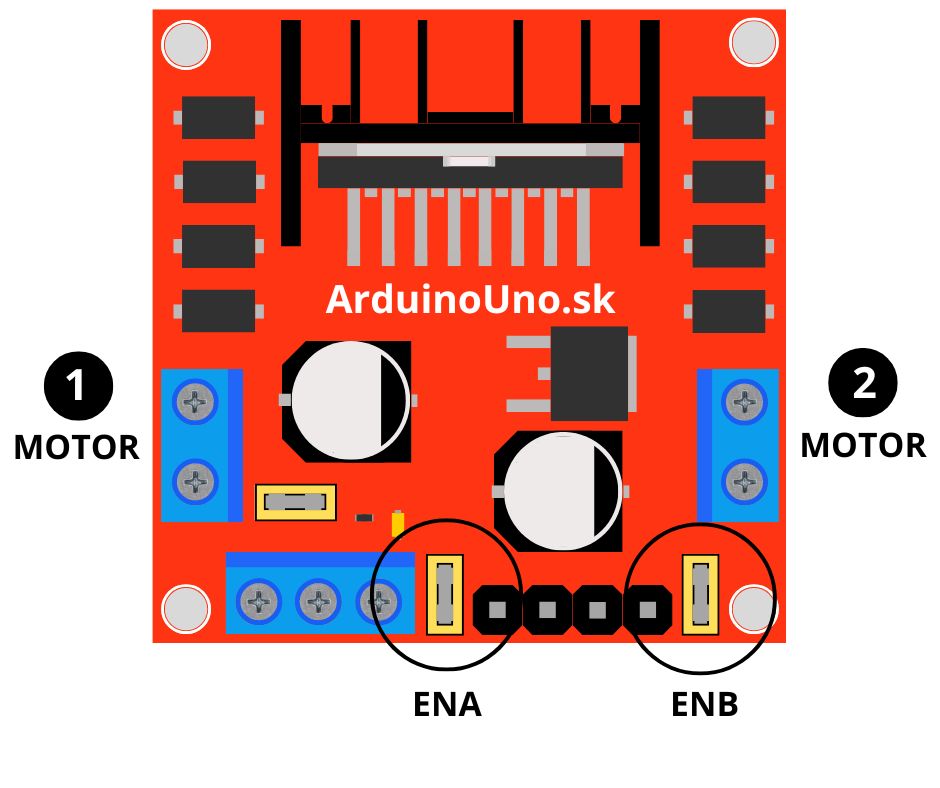
jumper signál  pre motor 1 (A). Ak odstránime prepojku, musíme tento pin pripojiť k vstupu mikrokontroléra. Týmto spôsobom môžeme ovládať rýchlosť motora 1. Ak pripojíme tento kolík k zemi, motor 1 sa vypne.
pre motor 1 (A). Ak odstránime prepojku, musíme tento pin pripojiť k vstupu mikrokontroléra. Týmto spôsobom môžeme ovládať rýchlosť motora 1. Ak pripojíme tento kolík k zemi, motor 1 sa vypne.- jumper signál pre motor 2 (B). ak odstránime prepojku, musíme tento pin pripojiť k vstupu mikrokontroléra. Týmto spôsobom môžeme ovládať rýchlosť motora 2. Ak pripojíme tento kolík k zemi, motor 2 sa vypne.
- + jumper povolí signál pre krokový motor.
- , , , , 4 Výstupné kolíky pre motor krokový
- ( , , ) Výstupné kolíky pre motor 1 (A).
- ( , , ) Výstupné kolíky pre motor 2 (B).
- Vstup zo zdroja jednosmerného prúdu.
- Vstup dodáva energiu pre spínacie logické obvody vnútri L298N IC.
- Vstup Kolík zem.
Modul ovládača motora L298N využíva techniku ![]() na riadenie rýchlosti otáčania jednosmerného motora. Pri tejto technike môže byť rýchlosť jednosmerného motora riadená zmenou jeho vstupného napätia. Modulácia šírky impulzu je technika, pri ktorej sa priemerná hodnota vstupného napätia upravuje odoslaním série impulzov
na riadenie rýchlosti otáčania jednosmerného motora. Pri tejto technike môže byť rýchlosť jednosmerného motora riadená zmenou jeho vstupného napätia. Modulácia šírky impulzu je technika, pri ktorej sa priemerná hodnota vstupného napätia upravuje odoslaním série impulzov ![]() . Priemerné napätie je úmerné šírke impulzov, tieto impulzy sú známe ako pracovný cyklus. Ak je pracovný cyklus vyšší, potom sa priemerné napätie aplikuje na jednosmerný motor (vysoká rýchlosť) a čím je pracovný cyklus nižší, tým menšie je priemerné napätie na jednosmerný motor (nízka rýchlosť).
. Priemerné napätie je úmerné šírke impulzov, tieto impulzy sú známe ako pracovný cyklus. Ak je pracovný cyklus vyšší, potom sa priemerné napätie aplikuje na jednosmerný motor (vysoká rýchlosť) a čím je pracovný cyklus nižší, tým menšie je priemerné napätie na jednosmerný motor (nízka rýchlosť).
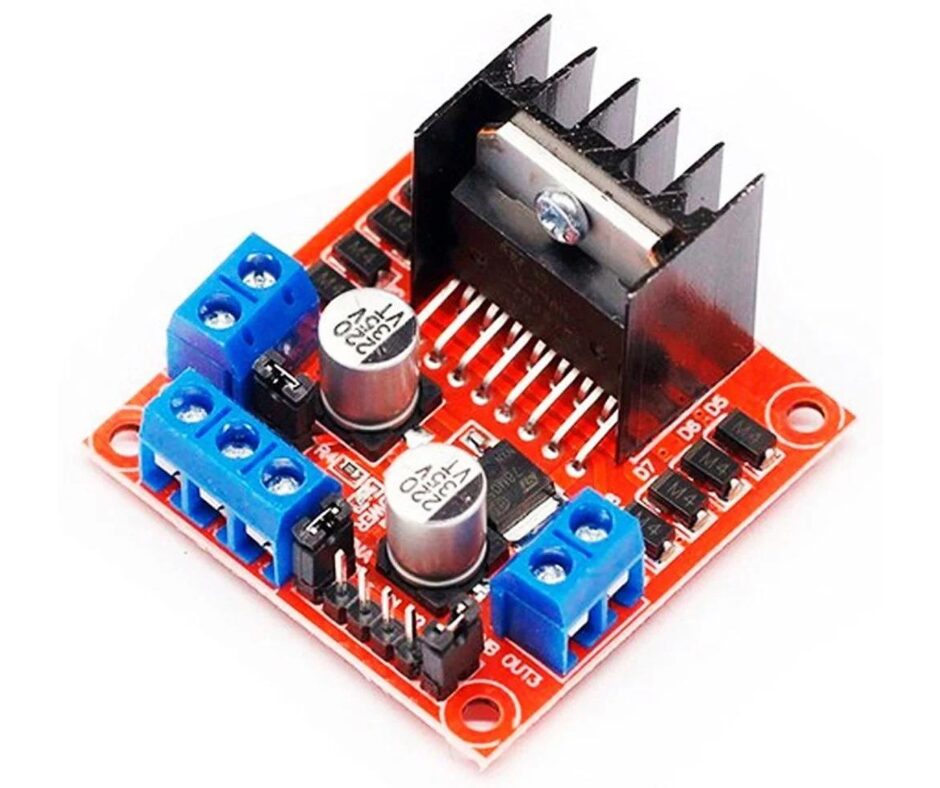
L298N je vysokonapäťový, duálny motorový ovládač s úplným mostíkom IC. Prijíma štandardné logické úrovne TTL (Control Logic) a vie riadiť indukčné záťaže, ako sú relé, solenoidy, jednosmerné a krokové motory. Jeho prevádzkové napätie je +5V až +46V a maximálny povolený prúd cez každý výstup 3A. IC má dva aktivačné vstupy ![]() a
a ![]() , ktoré slúžia na zapnutie alebo vypnutie zariadenia nezávisle od vstupných signálov. Čierny chladič je výborným pasívnym výmenníkom tepla, ktorý udržuje IC v prevádzkovej teplote od
, ktoré slúžia na zapnutie alebo vypnutie zariadenia nezávisle od vstupných signálov. Čierny chladič je výborným pasívnym výmenníkom tepla, ktorý udržuje IC v prevádzkovej teplote od ![]() -20C do +130C
-20C do +130C ![]() .
.
- Napätie pohonu: 5-35V; logické napätie: 5V
- Maximálna spotreba energie: 20W (pri teplote 75℃)
- Rozmery v mm (DxŠxV): 44 x 44 x 28
- Hmotnosť (g): 25
Poznámky :
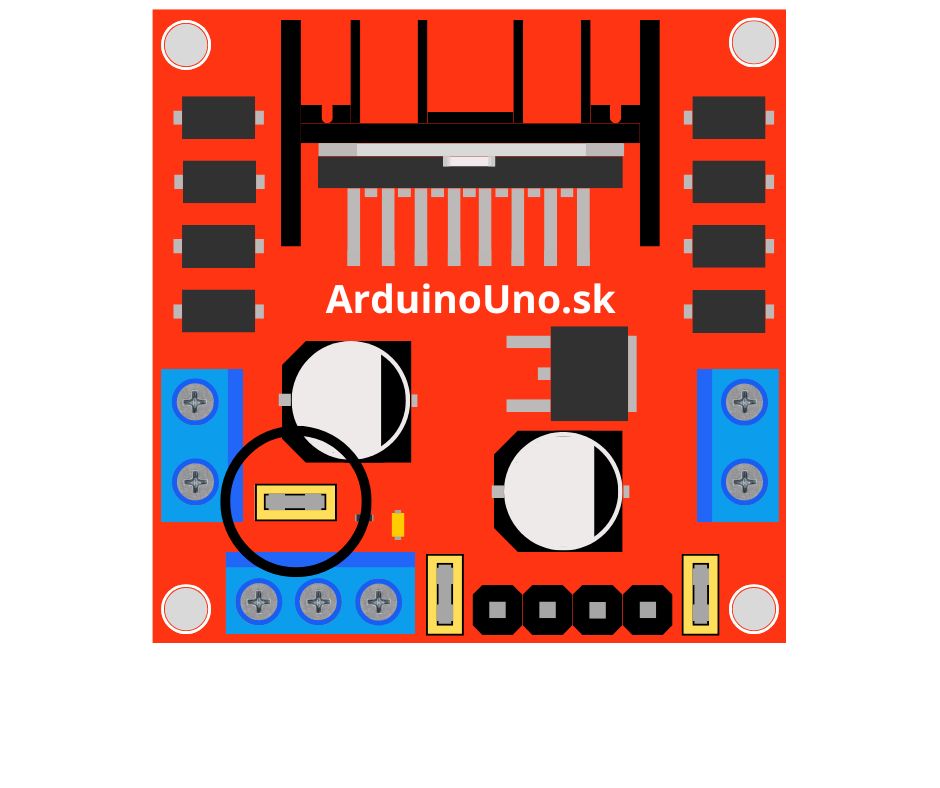
* Regulátor napätia 78M05 bude aktivovaný len vtedy, keď je umiestnená prepojka (jumper). Keď je napájanie menšie alebo rovné 12 V, potom bude interný obvod napájaný regulátorom napätia a 5V kolík možno použiť ako výstupný kolík na napájanie mikrokontroléra. Prepojka by sa nemala umiestňovať, keď je napájanie väčšie ako 12V a samostatných 5V by sa malo privádzať cez 5V svorku na napájanie vnútorných obvodov.
*Piny ![]() a
a ![]() sú kolíky na ovládanie rýchlosti motora 1 alebo (A) a motora 2 (B), zatiaľ čo
sú kolíky na ovládanie rýchlosti motora 1 alebo (A) a motora 2 (B), zatiaľ čo ![]() ,
, ![]() ,
, ![]() a
a ![]() sú kolíky na ovládanie smeru motora 1(A) a motora 2(B).
sú kolíky na ovládanie smeru motora 1(A) a motora 2(B).
Tento ovládač motora je ideálny pre robotické a mechatronické projekty na ovládanie motorov, spínačov, relé z mikrokontrolérov. Ideálne na pohon jednosmerných a krokových motorov pre roboty sledujúce riadok, robotické ramená atď.
Pridaj komentár